
ComNets Testbeds
This is an overview of the testbeds at the ComNets chair.
Non Public 5G Networks
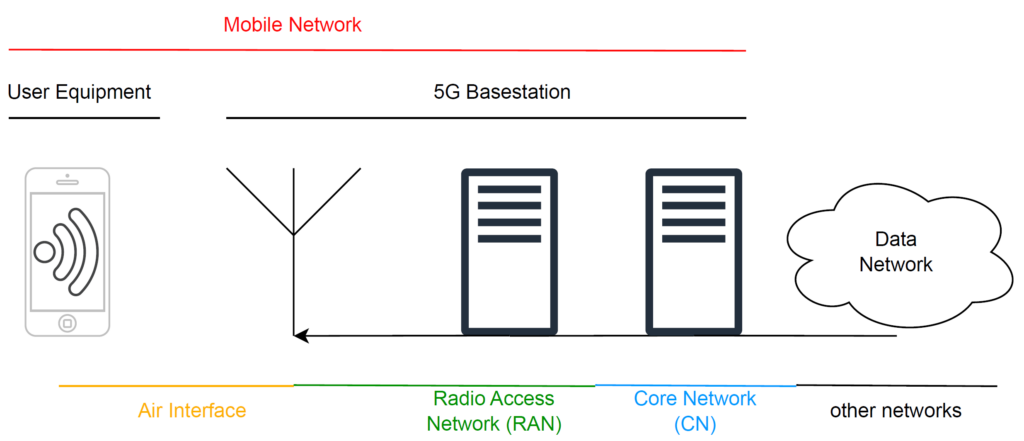
A 5G Non-Public-Network (5G NPN) consists of different components which are all available in the testbed. The first component is the user equipment (UE), this is most easily described as a smartphone with a SIM-Card. The SIM-Card is the identifier and cryptographic device, required to access the network. Via cellular technology the user equipment connects to the 5G base station, where one or multiple cells can be deployed. The 5G base station consists of two primary components: the Radio Access Network (RAN) and the Core Network (CN). The RAN can utilize either commercially available hardware (COTS) or application-specific integrated circuits (ASICs). In contrast, the CN exclusively employs COTS hardware across all testbeds. The CN encompasses various network functions, including authentication and mobility management, session management, user data management, policy control, and the gateway to other data networks.
Our private 5G testbed is categorized into two main areas. The first is a university-wide 5G non-public network (NPN) that leverages commercially available hardware and software, ensuring continuous stability. This network facilitates application testing and interworking between 5G and other systems. Given its role as integral infrastructure, updates are solely installed by the central operator.
All components are interconnected to a central server hosting the 5G CN, GeniusCore.
The second category comprises lab testbeds within the ComNets Chair. These testbeds feature diverse hardware and software components to support individual 5G NPNs. They enable interoperability testing and measurements. Multiple legacy RAN systems are available, including Nokia and Huawei, which have been verified for interoperability with Open5GS (Open Source 5G-CN), GeniusCore, and OpenAirInterface CN (Open Source 5G-CN). Ericsson RAN is exclusively compatible with an Ericsson Core.
In addition to legacy RAN, O-RAN-based testbeds are also present. While legacy RAN is proprietary, O-RAN adheres to an open interface standard, promoting interoperability. O-RAN often operates fully virtualized on COTS hardware. Legacy RAN is disaggregated into three components: Radio Unit (RU), Distributed Unit (DU), and Central Unit (CU) with open interfaces between them. The testbed employs COTS servers to execute the CU and DU, thereby reducing costs. Multiple disaggregated O-RAN systems are integrated into the testbed. One is a commercial system from AirSpan, while the others are open-source projects: OpenAirInterface and srsRAN Project.
For integration testing, All-In-One Small Cells are available. These compact and easy-to-operate gNBs can be quickly deployed due to their simplified operation compared to legacy systems or disaggregated O-RAN. Vendors within the testbed include: AirSpan Airvelocity n78 (2T2R), T&W/Node-H small Cell n78 (2T2R), LiteOn FlexFI n78 (4T4R), and NI USRP N310.
This testbed is build with a Nokia Radio A Consicess Network with five sites. The sites have the following Equipment:
Site 1: 1 x Nokia ASIL Systemunit, 2 x Nokia ABIO Baseband; 2 x Nokia AEQE n78 Antenna (64T64R mmMIMO), 1 x Nokia AWEUC mmWave (n258) Antenna (2T2R)
Site 2: 1 x Nokia ASIL Systemunit, 1 x Nokia ABIO Baseband; 2 x Nokia AEQE n78 Antenna (64T64R mmMIMO)
Site 3 and 4: 1 x Nokia ASIL Systemunit, 1 x Nokia ABIO Baseband; 2 x Nokia AWHQF n78 Antenna (4T4R)
Site 5: 1 x ASOE System and Basebandunit, 2 x AZQJ n78 Antenna (8T8R)
They are all connected to a central server, where the 5G-Core, GeniusCore is hosted.
The second is the lab testbed at the ComNets Chair. Here we have different Hard- and Software Components to run a private 5G network, based on different release. Here interoperability tests and measurements can be performed.
There are several classical RAN Systems available. Nokia and Huawei have been tested and verified to be interoperable with the Open5GS (Open Source 5G-Core); the GeniusCore and the OpenAirInterace 5G-Core (Open Source 5G-Core). Ericsson RAN is only compatible to an Ericsson Core.
The following classical cellular systems are at the chair:
Nokia; ASIK Systemunit, ABIL Baseband, AZQH Radio, 2 x Indoor Airscale Hub and 8 x AWHQB Indoor Small Cell n78 (4T4T); 4 x AWHQK Indoor Small Cell n78 (4T4R)
ASIL Systemunit, ABIO Basebandunit,
Ericsson 5G NSA System: Baseband 6630; Dell Server for 4G and 5G Ericsson Core, Radio 2212, Radio 8823, Indoor Radio Uni, Ericsson Indoor Small Cell
Ericsson 5G SA System (Industry Connect): Network Controller, Dot 4479, IRU, Micro Radio 4408 n78 (4T4R)
Huawei: Basestation 5900; Radio RRU5836E n78 (4T4R); pRRU5935 3.7G n78 (4T4R); Indoor Radio Hub
Besides classical RAN there are also O-RAN Solutions available in the Testbed. While classical RAN is proprietary, O-RAN is mostly software based and supposed to be interoperable. The classical basestation gets disaggregated into three components: RU, DU, CU with open interfaces between them. The CU and DU are supposed to be executed on COTS servers; thus, reducing costs.
There are two disaggregated O-RAN Systems in the testbed. One is the commercial system from AirSpan, the other one is the open source project of OpenAirInterface.
For quick PoC there are All-In-One Small Cells available. They are a small, easy to operate gNB and can be set up quickly as they are less complex than classical systems or disaggregated O-RAN. Vendors in the Testbed are: AirSpan Airvelocity n78 (2T2R), T&W/Node-H small Cell n78 (2T2R), LiteOn FlexFI n78 (4T4R)
Testbed used in publications :
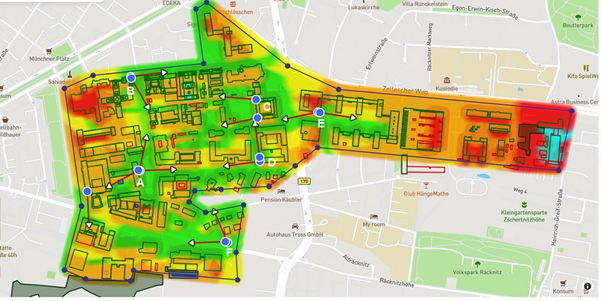
- ‚Äú5G Campus Networks: A First Measurement Study‚ÄĚ, by Justus Rischke; Peter Sossalla; Sebastian A. W. Itting; Frank H. P. Fitzek; Martin Reisslein, In: IEEE Access, vol. 9, pp. 121786-121803, 2021.
-  “5G on the Cheap: Configurable Low-Cost Cellular Industrial Communication“, by Andreas I. Grohmann; Mauri Seidel; Christopher Lehmann; Thomas Höschele; Martin Reisslein; Frank H. P. Fitzek, In: International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Male, Maldives, 2022.
- Seidel, Mauri; Grohmann, Andreas I.; Sossalla, Peter; Kaltenberger, Florian; Fitzek, Frank H. P.. “How to Get Away with OpenAirInterface: A practical Guide to 5G RAN Configuration. In: 2023 3rd International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), pp. 1-6, 2023
- Grohmann, Andreas I.; Peters, Frank; Ku√ü, David; Seidel, Mauri; Fitzek, Frank H. P. .‚ÄĚHYDRAted ‚Äď High Yield Dense Robotic Arms technically evolved demonstrator‚ÄĚ (Proceedings Article) In: 2024 IEEE 21st Consumer Communications & Networking Conference (CCNC) (CCNC 2024), pp. 2, Las Vegas, USA, 2024,
- Grohmann, Andreas I.; Peters, Frank; Ku√ü, David; Sossalla, Peter; Fitzek, Frank H. P.. ‚ÄúHYDRA ‚Äď High Yield Dense Robotic Arms‚ÄĚ In: 2023 3rd International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), pp. 1-6, 2
- H√∂schele, Thomas; Kaltenberger, Florian; Grohmann, Andreas I.; Tasdemir, Elif; Reisslein, Martin; Fitzek, Frank H. P. ‚Äú5G InterOPERAbility of Open RAN Components in Large Testbed Ecosystem: Towards 6G Flexibility‚ÄĚ. In: European Wireless 2022 ‚Äď 6G and 5G beyond Communications (EW 2022), Dresden, Germany, 2022.
- Grohmann, Andreas I.; Lehmann, Christopher; H√∂schele, Thomas; Fitzek, Frank H. P.. ‚ÄúBakeryRobot: 5G connected robot for SMEs‚ÄĚ.¬† In: 2022 IEEE 19th Annual Consumer Communications & Networking Conference (CCNC) (CCNC 2022), virtual, 2022.
- Sossalla, Peter; Steinke, Jannek; Vielhaus, Christian Leonard; Hofer, Johannes; Rischke, Justus; Fitzek, Frank H. P.. ‚ÄúRemote Controlling Mobile Robots With Adaptive Video Streaming and Augmented Reality‚ÄĚ. In: 2023 IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom) (IEEE BlackSeaCom 2023), Istanbul, Turkey, 2023.
- Rischke, Justus; Vielhaus, Christian Leonard; Sossalla, Peter; Wang, Junyue; Fitzek, Frank H. P.. ‚ÄúComparison of UPF acceleration technologies and their tail-latency for URLLC‚ÄĚ In: 2022 IEEE Conference on Network Function Virtualization and Software Defined Networks (NFV-SDN) (NFV-SDN‚Äô22), Phoenix, USA, 2022.
- Sossalla, Peter; Rischke, Justus; Baier, Fabian; Itting, Sebastian A. W.; Nguyen, Giang T.; Fitzek, Frank H. P.. ‚ÄúPrivate 5G Solutions for Mobile Industrial Robots: A Feasibility Study‚ÄĚ. In: 27th IEEE Symposium on Computers and Communications (ISCC 2022), Rhodes island, Greece, 2022.
- Rischke, Justus; Vielhaus, Christian Leonard; Sossalla, Peter; Itting, Sebastian A. W.; Nguyen, Giang T.; Fitzek, Frank H. P.. ‚ÄúEmpirical Study of 5G Downlink & Uplink Scheduling and its Effects on Latency.‚ÄĚ In: 2022 IEEE 23rd International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM) (WoWMoM 2022), Belfast, United Kingdom (Great Britain), 2022.
- Sossalla, Peter; Rischke, Justus; Nguyen, Giang T.; Fitzek, Frank H. P.. ‚ÄúOffloading Robot Control with 5G‚ÄĚ. In: 2022 IEEE 19th Annual Consumer Communications & Networking Conference (CCNC) (CCNC 2022), Las Vegas, USA, 2022.
- Rischke, Justus ‚Äú5G Campus Networks: Measurement Traces‚ÄĚ IEEE Dataport, 2021, visited: 09.06.2021.
Contact person responsible :
Campus wide 5G NPN: M.Sc. Sebastian Itting
O-RAN testbeds: Dipl.-Ing. Andreas Ingo Grohmann
Software Defined Radio
An SDR testbed equipped with eight NI USRP X410 devices interconnected in pairs to create four 8√ó8 MIMO users provides an ideal platform for testing and evaluating novel communication techniques. While most of our research is conducted at higher layers of the communication stack, novel ideas require our researchers to delve deeper into the physical layer of the communication system. The physical layer is the lowest layer of the communication stack and is responsible for transmitting and receiving signals between devices. It is where critical tasks such as modulation, coding, and channel estimation take place. As such, it is essential to have a powerful and flexible testbed to study and optimize the performance of these tasks. The SDR testbed provides our researchers with the capability to design and implement custom communication systems, modify existing protocols, and experiment with new techniques. For instance, the MIMO capability of the testbed allows for the study of advanced signal processing algorithms, beamforming techniques, and antenna configurations to improve signal quality and increase data rates. In summary, the SDR testbed with the interconnected USRP X410 devices is a powerful tool for researchers to investigate and optimize the performance of communication systems at the physical layer. It enables the study of advanced techniques and algorithms that can improve the efficiency, reliability, latency and security of communication systems.
Contact person responsible : Dr.-Ing. Juan A. Cabrera Guerrero
Wireless Meshed Networks
Wireless Mesh Networks (WMNs) enable devices with radio capabilities to communicate with each other directly. Such networks are based on opportunity instead of planning: devices detect the existing network on their own and connect to it without further configuration. Therefore, WMNs provide flexibility and are easy to extend. In our mesh testbed at the ComNets chair, we connect more than 50 static and several mobile devices in a mesh network that uses WiFi as its radio access technology. Together, these devices span a mesh network that grants coverage with seamless connectivity along the chair’s corridors. With live monitoring, the health of the network alongside a wealth of status information is visualized graphically. The network provides great research opportunities. We run several short-term and long-term experiments around the clock to test the limits of WMNs as a communication technology. These tests cover the throughput, latency, resilience, power consumption, and efficiency in scenarios in which the network is either idle or under stress. The result of our tests is a dataset that is unique both in scale and versatility of information. In addition to that, our testbed enables us to carry out protocol research for WMNs in a real testbed deployed in an office environment. New mechanisms and functionality can be evaluated directly on real hardware instead of resorting back to simulations, which strengthens the validity of results and insights.
Contact person responsible : Dipl.-Ing. Christian Vielhaus
In-Network Computing with P4
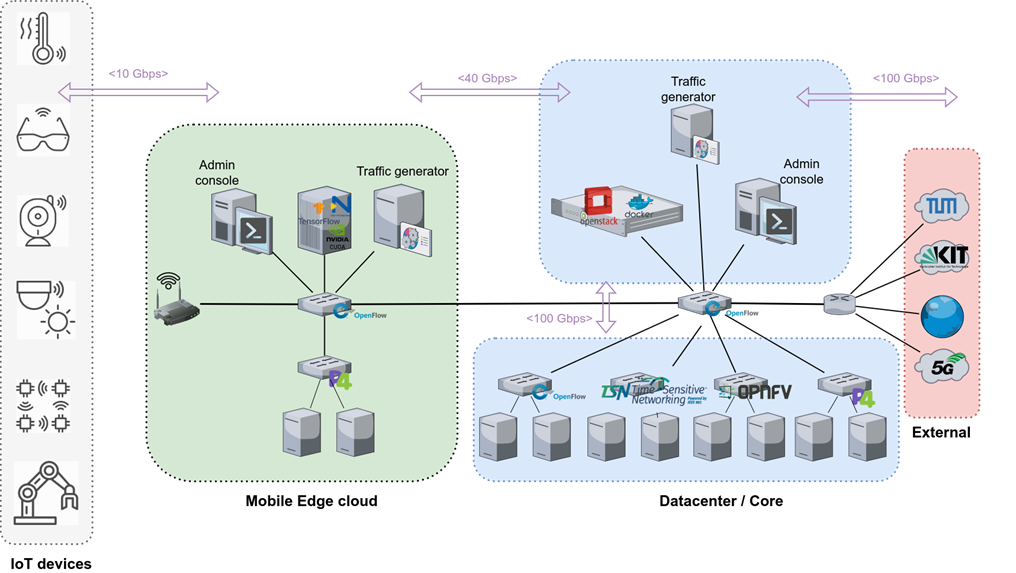
We aim to build a heterogeneous and sophisticated testbed, consisting of state-of-the-art technologies, such as SDN, NFV, Programmable Data Planes, among others. The testbed allows us to cover scenarios of both core and edge networks.
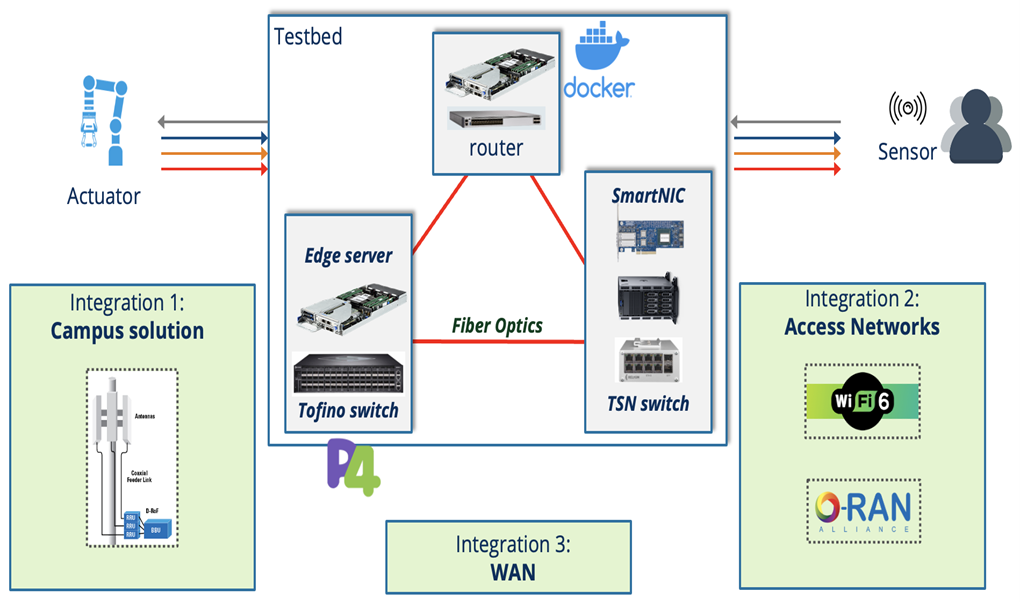
The core of the testbed consists of three parts: i) Softwarized networks leveraging SDN and NFV, to implement and deploy MEC applications using Dockers or virtual machines; ii) programmable data planes with SmartNIC and Tofino switches; and iii) Time-Sensitive Networks with a strict synchronization of time. Potential extensions include integrating with 5G campus networks, various radio technologies such as Wi-Fi6 and OpenRAN for the access networks. Last, we are extending our testbed to connect with other research labs such as TUM and KIT.
We are currently using our testbed to enable various emerging use cases such as network coding, data compression, and service mesh. In particular, we deployed network coding and data compression as network functions on Cisco High-performance Catalyst 9500 switch.
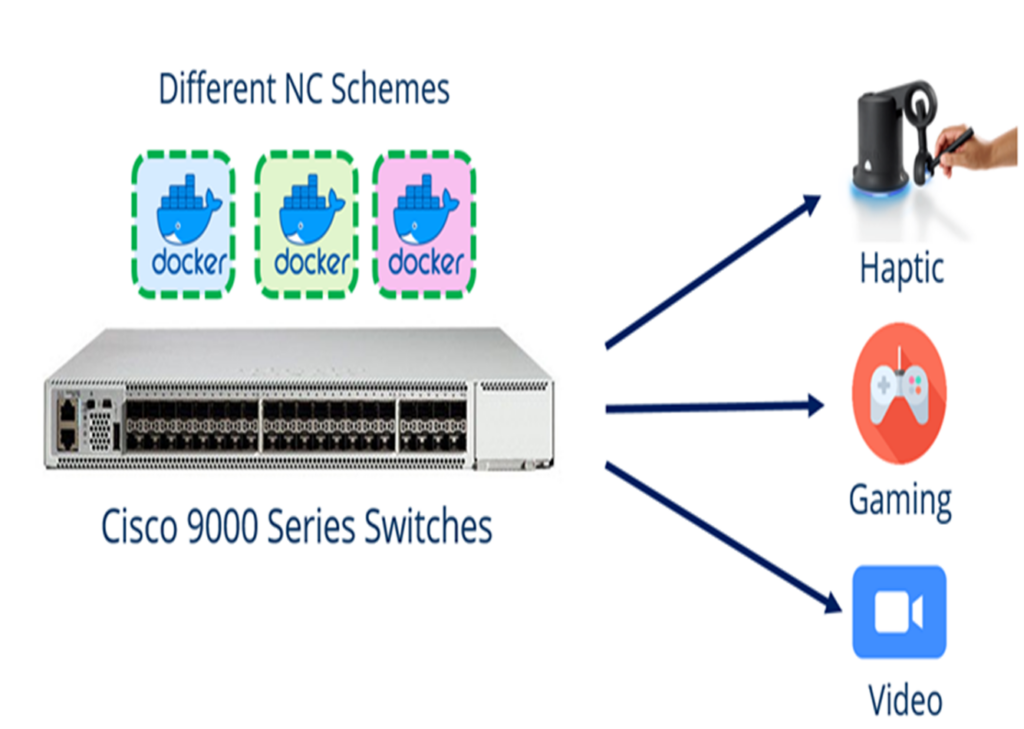
Use case : Network coding placement using programmable switches
Unlike traditional monolithic applications, cloud-native applications are the collection of small and independent services, which are so-called microservices. As cloud-native applications have gained tremendous interest in recent years, many cloud vendors such as Google Cloud and Amazon Web Service already provided cloud platforms for cloud-native applications. Service meshes have been considered as a de facto communication substrate for cloud-native applications. Specifcially, each service in a cloud-native application communicate to each other via a software proxy, called sidecar. A sidecar intercepts cloud traffic reaching a service and thus provides various control functions such as security and traffic management. However, as each sidecar is co-located with each service, this design introduces overhead (e.g., increasing latency and lowering throughput) for cloud-native applications, especially for applications that include a significant number of services. Our goal is to accelerate mesh networking using Nettronome SmartNICs as P4 target.
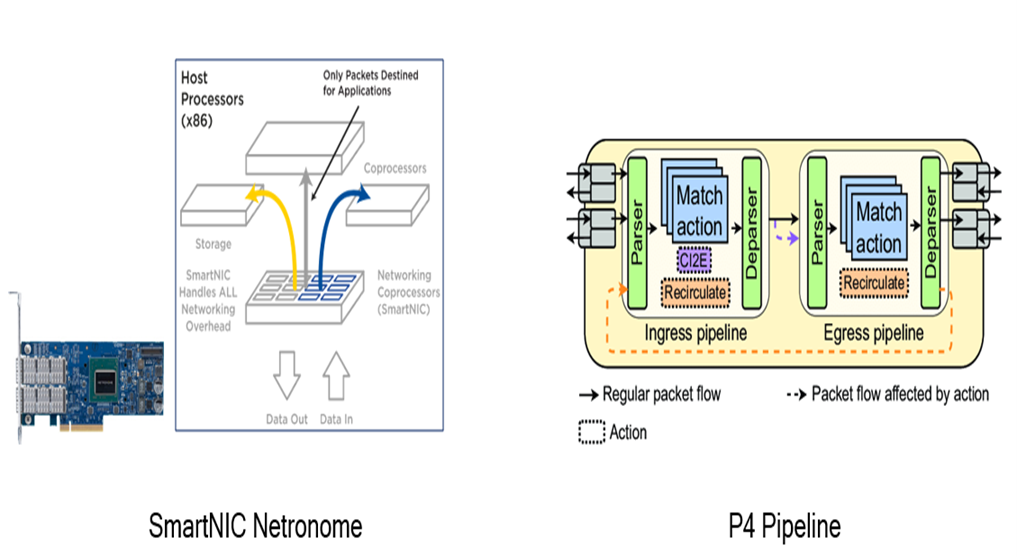
Use case : Accelerating mesh networking using SmartNICs as P4 target
Testbed used in publications:
- Doan, Tung V.; Scheinert, Tobias; Lhamo, Osel; Cabrera, Juan A.; Fitzek, Frank H. P.; Nguyen, Giang T. ‚ÄúInterplay Between Priority Queues and Controlled Delay in Programmable Data Planes‚ÄĚ In: 2023 18th Wireless On-Demand Network Systems and Services Conference (WONS), pp. 64-71, 2023.
- Doan, Tung V.; Nguyen, Giang T.; Reisslein, Martin; Fitzek, Frank H. P. ‚ÄúFAST: Flexible and Low-latency State Transfer in Mobile Edge Computing‚ÄĚ In: IEEE Access, vol. 9, pp. 115315-115334, 2021.
Contact person responsible : Prof. Dr.-Ing. Giang T. Nguyen
Time-Sensitive Networking
The Time-Sensitive Networking (TSN) testbed comprises a TSN switch with five dedicated nodes connected to the switch in a star topology. The five nodes are Commercial-of-the-Shelf (COTS) hardware, including an x86 CPU and multiple Network Interface Cards (NICs). One of the nodes acts as a sink, the others can be used for sending traffic with different priorities. All the sending nodes’ traffic must pass through the switch, the Device-under-Test (DuT). Therefore, a bottleneck at the switch is created which enables studies for different scheduling and traffic shaping strategies. All devices in the TSN testbed are synchronized with the Precision Time Protocol (PTP). Hardware timestamping is leveraged to provide nanosecond accuracy. The one-way latency can be measured by the duration from the first bit of the packet sent out by the sender node to the first bit of the packet received by the NIC of the sink, which enables to measure the sojourn (residence) time of a packet inside the DuT.
Testbed used in publications:
- TSN-FlexTest: Flexible TSN Measurement Testbed (Extended Version)
- Flexible Measurement Testbed for Evaluating Time-Sensitive Networking in Industrial Automation Applications
- Healing Hands: The Tactile Internet in Future Tele-Healthcare
Contact person responsible : Dipl.-Ing. Stefan Senk
Hand Gestures for Negative Latency
The negative latency testbed demonstrates the possibilities of anticipatory systems in order to provide reliable and trustworthy predictions in the context of human-machine interaction. The anticipations can then enable negative latency so tactile feedback can be provided within the sufficient time constraint. The testbed consists of a monitor displaying a machine learning classifiers confidence in an anticipation decision, a smart glove and corresponding wi-fi router, as well as pc running the machine learning classifier in real-time.

Contact person responsible : Dipl.-Ing. Jonas Schulz
Localisation with Mobile Robotics
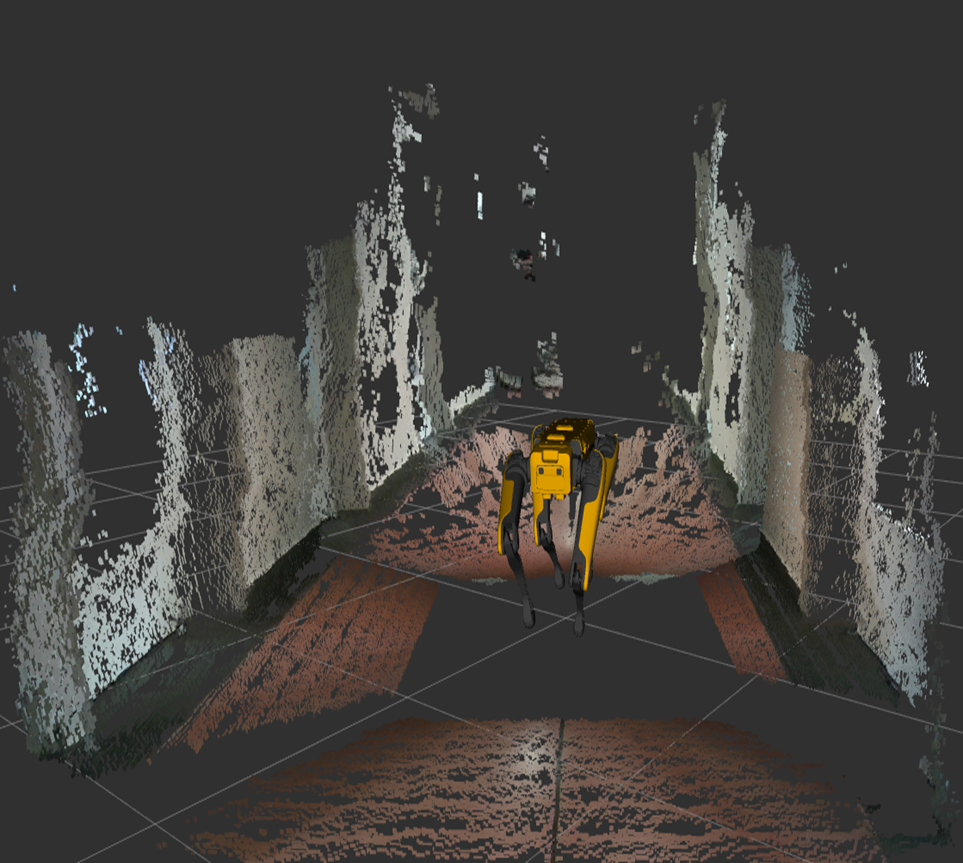
Current advances in robotics are enabling more and more application scenarios. In particular, quadrupedal robots, like Boston Dynamic’s Spot, have shown superior performance in stability, manoeuvrability, and versatility. Possible areas of operation could be inspection and maintenance or search and rescue missions. If SPOT is to be controlled remotely, without a line of sight between robot and operator, difficulties arise. The user needs a visual representation of Spot’s current environment in order to control it. For this purpose a Human Machine Interface is developed. Augmented Reality (AR) glasses, such as Microsoft’s HoloLens2, provide an excellent tool for this purpose, as they offer great flexibility to the operator. The Human Machine Interface should fulfil two tasks. It should provide the operator with a real-time representation of Spot’s environment. The visualization of the camera data does not provide a sufficient Quality of Experience (QoE) because a sense of depth and the already visited environment are lost to the operator. Therefore, an accurate and real-time 3D map, generated by Visual or LiDAR Simultaneous Localization and Mapping (SLAM) systems, should be displayed. In addition, the control by gesture recognition shall lead to an increased QoE.

Contact person responsible : Dipl.-Ing. Johannes Hofer
Massive Industrial Robotics
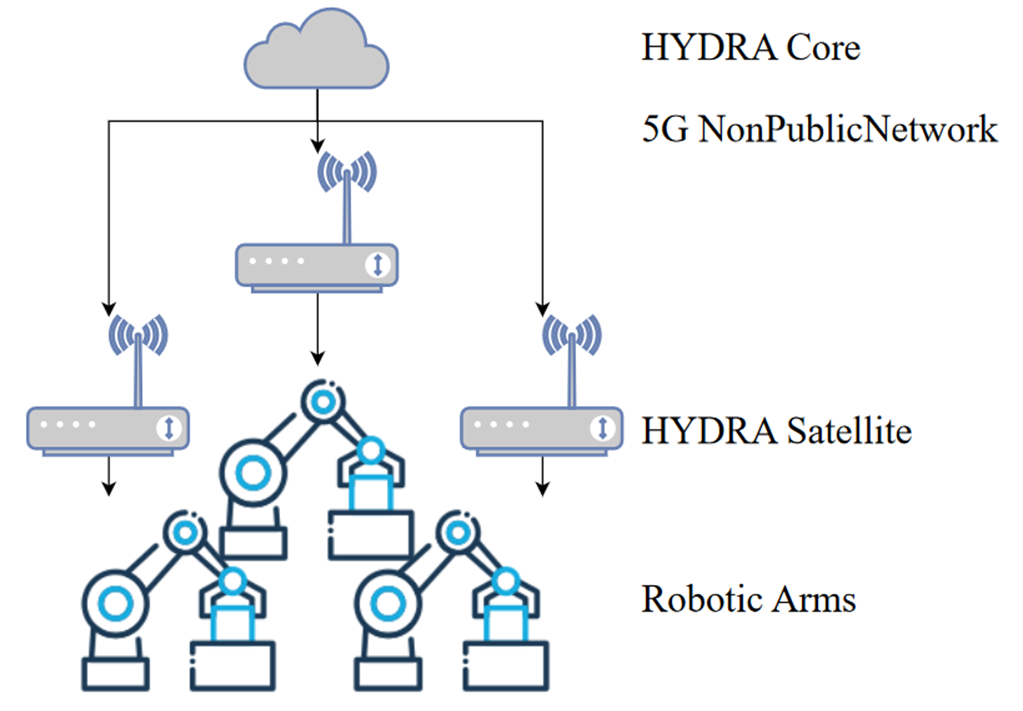
In recent years, there has been a significant increase in the use of robotic arms in manufacturing and automation. The integration of multiple robotic arms in industrial applications has traditionally been limited by the challenges of collision avoidance and the difficulty of coordinating the movements of different types of robots from different manufacturers. The RoboSphere represents a novel approach to addressing the challenges of coordinating densely packed robotic arms in manufacturing environments. Our approach relies on the use of 5G NPNs to enable processing in the Multi-Access Edge Cloud (MEC), which allows for real-time monitoring and control of robotic arms. The flexibility of the control system allows for the integration of robots from different manufacturers, while its wireless configuration reduces installation costs and increases flexibility. The system represents a key building block for the future of the manufacturing industry in which flexibility and adaptability is critical for success. Based on a task system, the RoboSphere demonstrates near field motion planning of six and more industrial robots in real time. This technology will be key for next generation manufacturing facilities.

Testbed used in publications:
‚Äď Grohmann, Andreas I.; Peters, Frank; Ku√ü, David; Seidel, Mauri; Fitzek, Frank H. P. .‚ÄĚHYDRAted ‚Äď High Yield Dense Robotic Arms technically evolved demonstrator‚ÄĚ (Proceedings Article) In: 2024 IEEE 21st Consumer Communications & Networking Conference (CCNC) (CCNC 2024), pp. 2, Las Vegas, USA, 2024,
Contact person responsible : M.Sc. Frank Peters
Quantum-Classical Internet
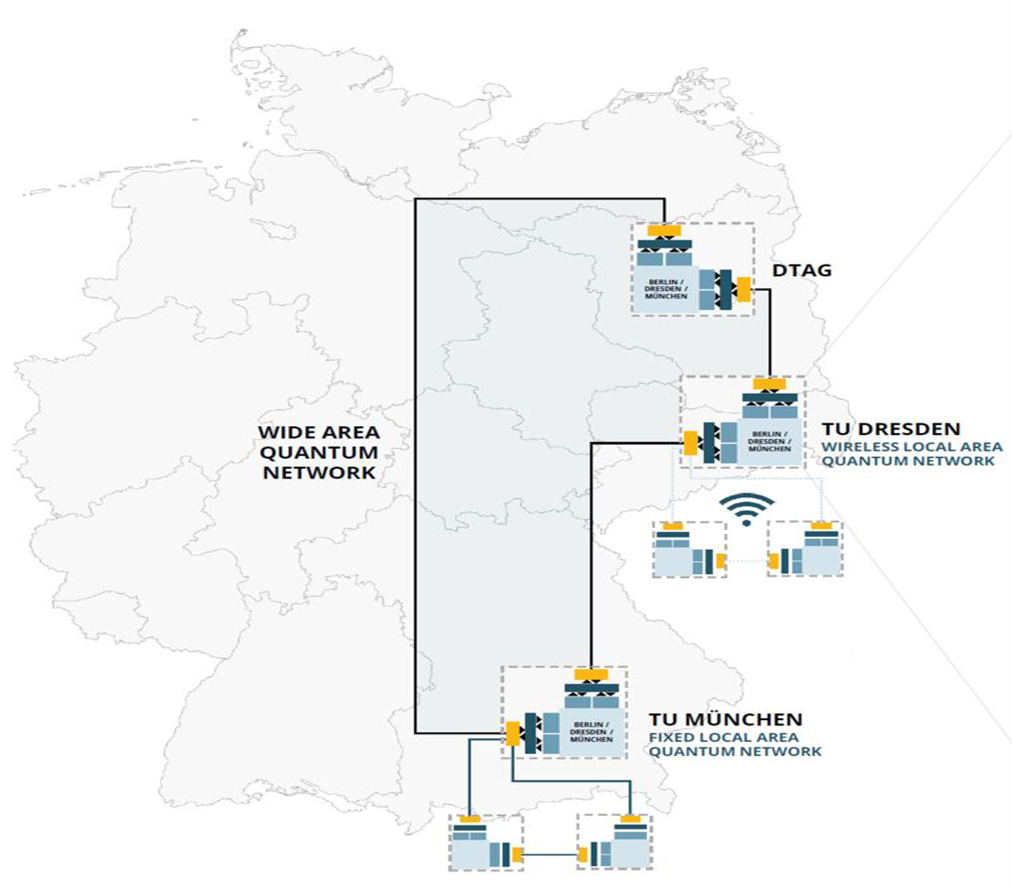
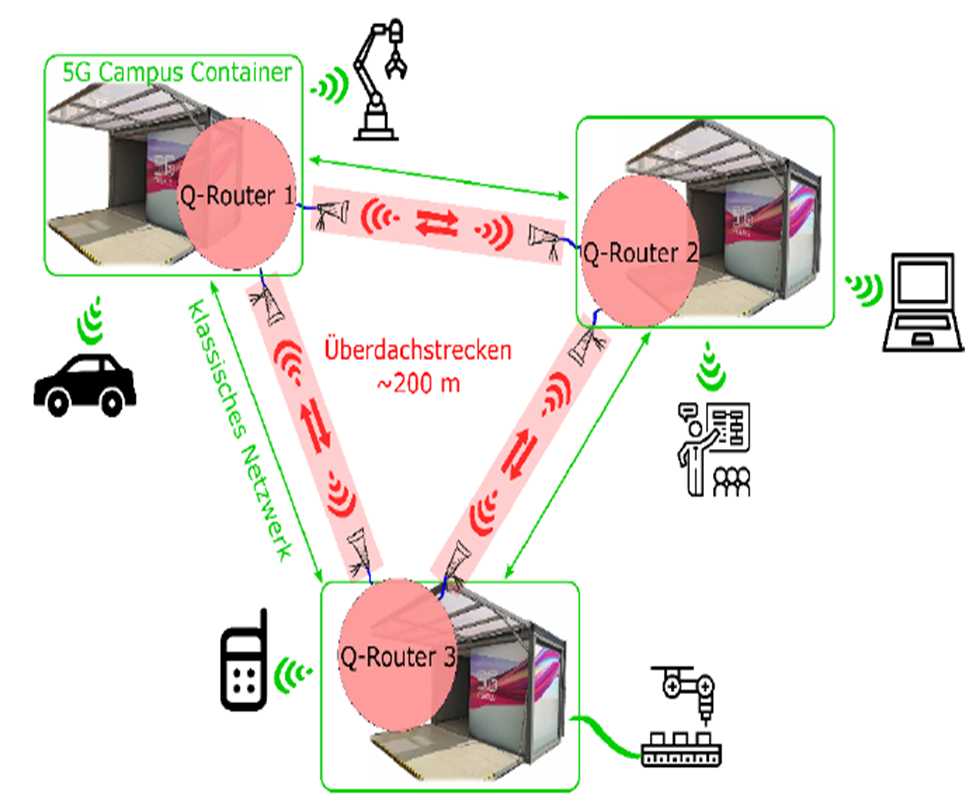
The Internet and 6G are defined as networks of networks. The testbed of the Quantum-Classical Internet is the first of its kind since it perfectly represents these definitions. The quantum-classical local area network is represented by a 5G campus network which is integrated with a quantum local area network of three quantum routers. This 5G-quantum network seamlessly transmits information via classical and quantum links, and enables the exploitation of quantum communication resources by the 5G network. For example, entanglement is distributed and routed among the three nodes of the network to provide ultra-precise synchronisation and random numbers distribution. Next, the quantum-5G network includes quantum sensing to test and analyse the scenario of quantum Internet of Things. This 5G-quantum network is then connected to a nationwide classical fibre optical network. This allows the first integration of 5G and quantum local area networks with long-range fibre-based communications. The testbed represents a complete network infrastructure providing resilience and reliability to low-latency communication verticals like the Tactile Internet.
Contact person responsible : Prof. Dr.-Ing. Riccardo Bassoli
6G-QKD Industrial Network
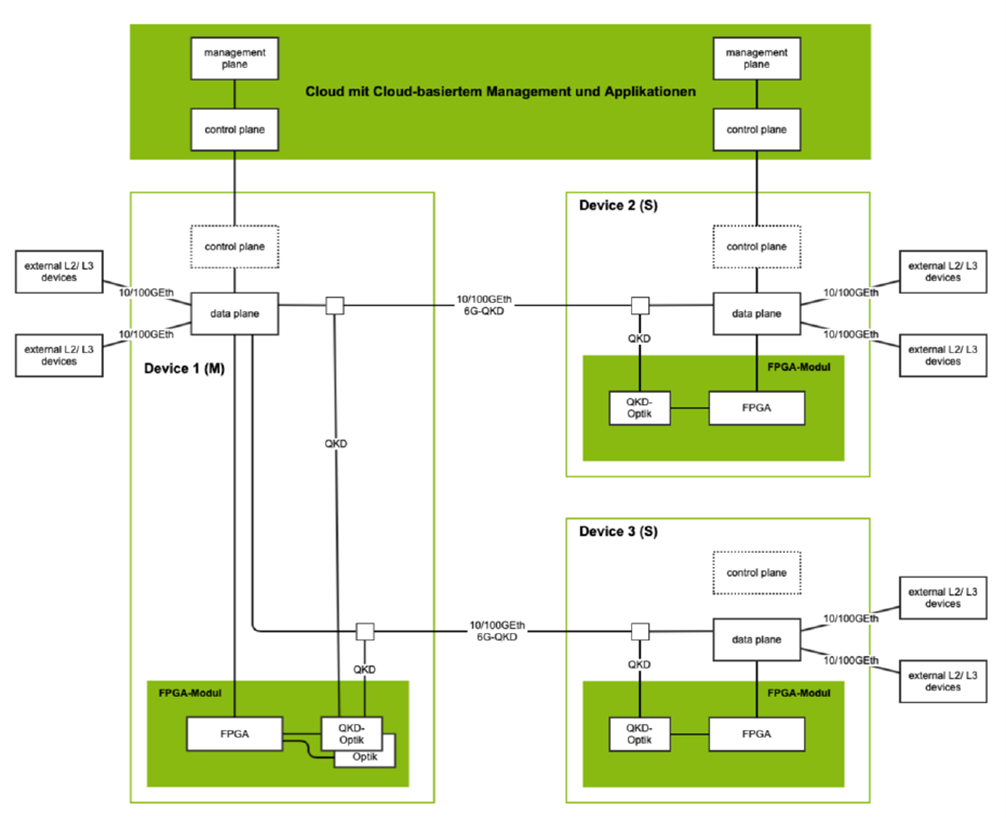
The demonstrator consists of a three-nodes 6G network with Radio Access Network (RAN) and Mobile Edge Cloud (MEC), which are secured via Continuous Variables (CV) Quantum Key Distribution (QKD). The quantum physical layer is integrated into the link and network layer operations in order to enable the key generation and distribution through the network according to applications‚Äė requirements. In addition, it ensures communication is not compromised and provides feedback to the management system in case of an attack. The MEC runs virtual network functions and software-defined networking (SDN), which also benefit fromCV-QKD security. The Control Plane is designed to ensure the routing and link management required by the CV-QKD protocol. Network programmability and reconfigurability applied to a 5G-CV-QKD scenario are also part of the testbed. The Control Plane has a MEC-based architecture with also a web graphical user interface. The testbed focuses on low latency applications, especially testing the QKD-secured RAN-MEC in a real scenario for remote control of industrial robots.
Contact person responsible : Prof. Dr.-Ing. Riccardo Bassoli
Molecular Communication
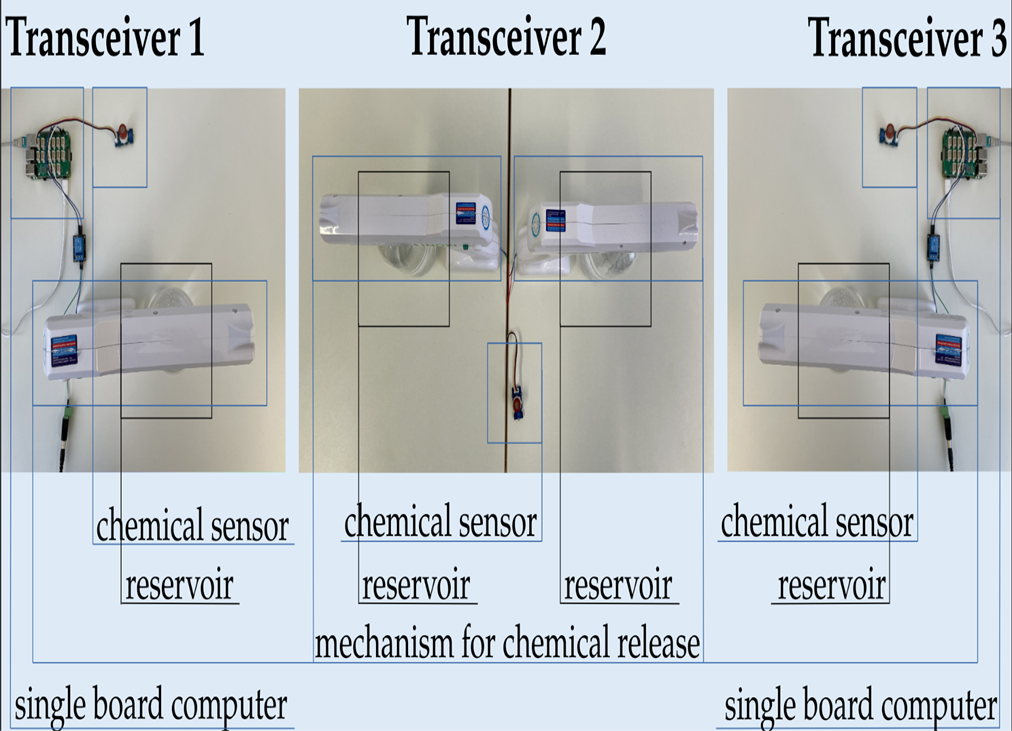
Molecular communication (MC) is a promising research field that seeks to enable communication between micro and nanoscale devices using molecules as information carriers. Inspired by biological communication systems, MC aims to develop novel communication technologies that can operate in harsh environments, where conventional wireless communication systems are not effective. MC has a wide range of potential applications, including medical diagnostics and drug delivery, environmental monitoring, and industrial automation. The MC testbed is a macroscale system comprising three nodes that enables both unidirectional and bidirectional transmissions. The system can be restructured to support both SISO and MIMO transmissions. The transmitter node releases ethanol molecules, which diffuse through the free space channel to the sensor of the receiving node to facilitate communication. The nodes are equipped with at least one actuator and one sensor; the middle node owns two actuators, for bidirectional release of the molecules. The hardware of the nodes includes a chemical sensor designed for molecule detection, an actuator for releasing the molecules, and a single board computer (Raspberry Pi). The actuator comprises a molecule reservoir and a mechanism for the chemical release of the molecules.
Testbed used in publications:
- P. Hofmann, J. T. G√≥mez, F. Dressler and F. H. P. Fitzek, ‚ÄúTestbed-based receiver optimization for SISO molecular communication channels,‚ÄĚ International Balkan Conference on Communications and Networking, Sarajevo, Bosnia and Herzegovina, 2022, pp. 120-125, doi: 10.1109/BalkanCom55633.2022.9900720.
- J. T. G√≥mez, P. Hofmann, F. H. P. Fitzek, and F. Dressler, ‚ÄúExplainability of neural networks for symbol detection in molecular communication channels,‚ÄĚ Workshop on Molecular Communications, Erlangen, Germany, 2023, accepted for publication.
Contact person responsible : Dipl.-Ing. Pit Hofmann
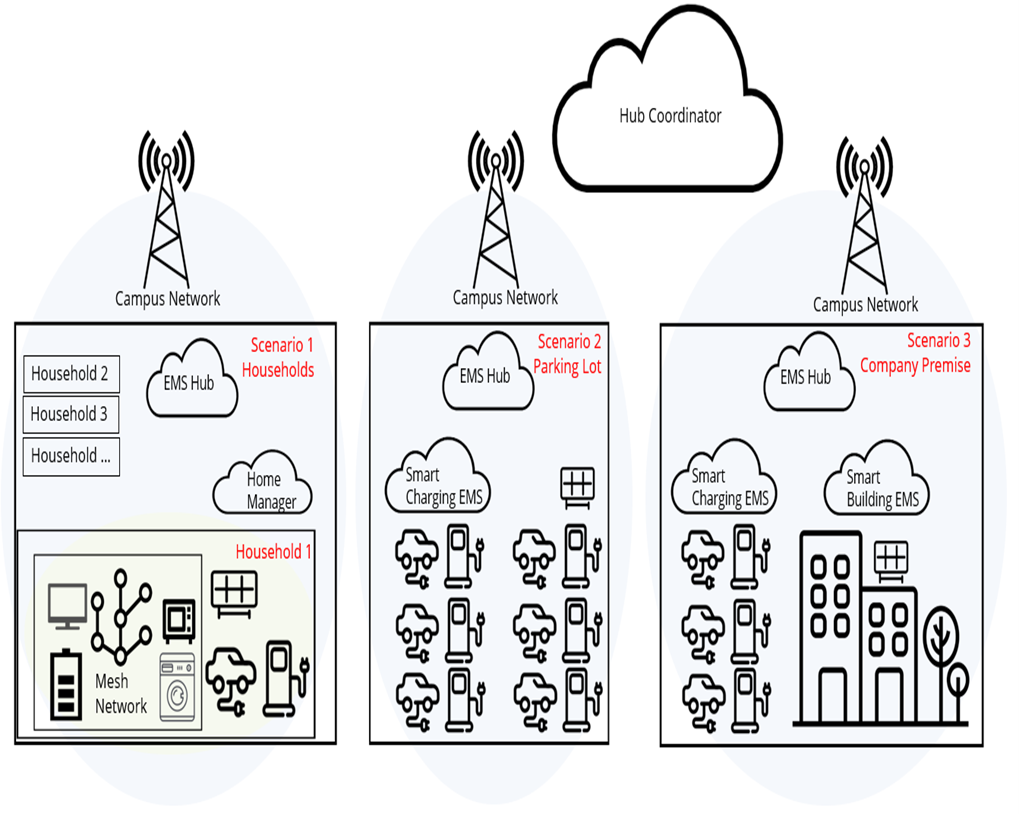
Internet of Energy
This Internet of Energy (IoE) testbed provides a comprehensive environment for exploring and assessing advanced energy management strategies. It consists of two physical locations, a downscaled test site, and several virtual simulated test sites, each representing an ‚ÄúArea Behind the Meter‚ÄĚ and showcasing the potential of decentralized energy distribution architectures driven by modern society‚Äôs environmental, social, and economic interests. The first physical location is a test site situated inside Barkhausenbau TU Dresden, featuring a bi-directional charging point, a battery electric vehicle (BEV), and photovoltaic panels. The second physical location is a parking lot in Dresden S√ľdh√∂he, equipped with multiple charging points. Both the downscaled test site and the virtual simulated test sites introduce diversity by offering a variety of scenarios with different configurations. This allows researchers to explore the complexities of renewable energy management under various conditions and settings, fostering a deeper understanding of the challenges and opportunities in this field. By interconnecting these diverse ‚ÄúAreas Behind the Meter,‚ÄĚ the testbed presents a unique opportunity to study low-latency energy grid optimization using advanced technologies such as 5G and artificial intelligence. This comprehensive platform enables researchers to develop intelligent energy management systems that can enhance the efficiency, resilience, and interconnectedness of the energy landscape.
Contact person responsible : Dr.-Ing. Rico Radeke